Die Truppenluftabwehr der NVA
Fla-Raketen und deren Lenkung
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Lenkverfahren Fla-Raketen mit Kommandolenkung:  Abb 2: FRa 3M8 des FRK 2K11 Krug  Abb 3: FRa 9M33 des FRK 9K33 AK halbaktives Lenkverfahren:  Abb 4. FRa 3M9 des FRK 2K12 Kub passives Lenkverfahren:  Abb 6: FRa 9M31 - Strela 1  Abb 7: FRa 9M32 Strela 2  Abb 9: FRa 9M37 des FRK 9K35 |
Zur Vernichtung von Luftzielen mit Fla-Raketen ist es
erforderlich, dass die Annäherung der Fla-Rakete an das Ziel mit der
erforderlichen Genauigkeit erfolgt und die Detonation des Gefechtsteils so
erfolgt, dass das Ziel getroffen wird. Dazu muß das Lenksystem die
Bewegungsparameter von Ziel und Rakete ermittelt, die Lenkparameter
errechnet und Lenkkommandos erzeugt werden. Dazu gibt es verschiedene
Lenkverfahren, die zugleich wesentlichen Einfluß auf die Leitmethoden haben. Anfang der 80-er Jahre wurde
an der OHS, Sektion 05 folgende Lenkverfahren für gelenkte Raketen klassifiziert: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
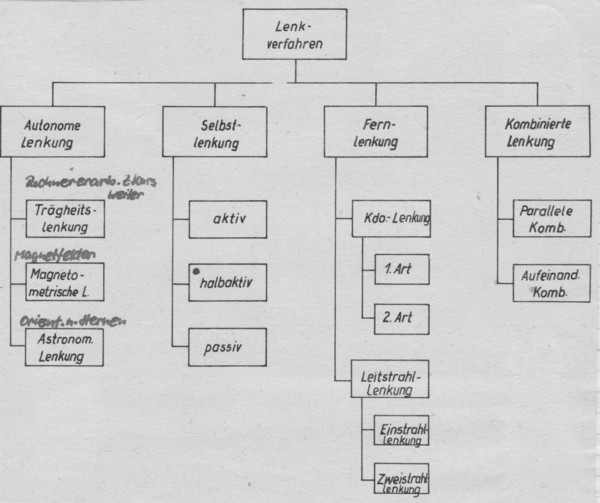 Abb 5: Schema Lenkverfahren
Abb 5: Schema Lenkverfahren | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Autonome Lenkverfahren spielen für Fla-Raketen eigentlich keine Rolle. Dabei handelt es sich um Verfahren, die vor allem bei gelenkten Boden-Boden Raketen (strategische, operativ- taktische Raketen) zum Einsatz kommen. Unabhängig, davon, nach welchem Verfahren eine Fla-Rakete ins Ziel gelenkt wird, stellt das Lenksystem einer Fla-Rakete einen Regelkreis dar, der Lenkkommandos erzeugt, die das Zusammentreffen von Fla-Rakete und Ziel gewährleisten sollen. Die wesentlichen, nachfolgend dargestellten Elemente eines Lenksystemes sind bei allen Lenkverfahren, wenngleich auch in unterschiedlicher Ausführung (Bodenstation, an Bord der Fla-Rakete, Nutzung von Funkmeßtechnik, Wärmestrahlung, Laser oder optischen Signalen) vorhanden. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Abb 8: Elemente eine Lenksystems bei Fla-Raketen Zu einem Lenksystem gehören immer Koordinatenmeßsysteme für das Ziel (MKZ) und die Rakete (MKR). Diese können sowohl bodengebunden (Zielbegleitstation, Raketenleitstation) sein oder durch den Zielsuchlenkkopf in der Rakete realisiert werden. Mit einem Rechner (RA) werden werden die Lenkparameter und Lenkkommandos erarbeitet. Zur Übertragung dient der Lenkkommandos dient ein System der Kommandoübertragung, dass sowohl als Bordsystem oder Bodenstation (Z.b. Funkkomandosender ) ausgeführt sein kann. Der Autopilot (AP) ist dagegen bei allen Verfahren als Bordsystem ausgeführt und gewährleistet die Stabilisierung der Fla-Rakete während des Fluges. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
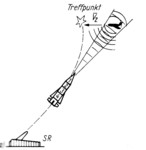 Abb 10: aktives Lenkverfahren |
aktives Lenkverfahren: Aktive Zielsuchlenksysteme nutzen zur Informationsgewinnung die vom Ziel reflektierte Energie. Dabei erfolgt die Zielaufhellung durch einen Sender an Bord der Rakete. Ein derartiges System würde außer der Startrampe, mit der die Rakete auf das Ziel gerichtet wird nach dem Erfassen des Ziels durch die Fla-Rakete keine weiteren bodengebundenen Mittel benötigen. Eine derartige Rakete würdenach dem fire & forgot Prinzip arbeiten. Da die Rakete einen Funkmeßzielsuchkopf mit eigenem Aufhellsender benötigt, ist eine solche Rakete relativ teuer und wurde bisher nicht realisiert. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
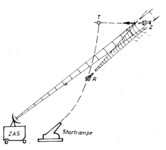 Bild 11: halbaktives Lenkverfahren |
halbaktives Lenkverfahren Beim halbaktiven Lenksystem verfügt die Rakete ebenfalls über einem Zielsuchlenkkopf, zur Geinnung der Information zu den Bewegungsparametern aus der vom Ziel reflektierten Energie. Die Aufhellung erfolgt jedoch über einen bodengebundenen Aufhellsender. Daher benötigen derartige Fla-Raketenkomplexe eine außer de Aufhellsender auch eine Zielbegleitstation. Beispiele: 3M9 (2K12 Kub), W-800 (S-200 Wega), 9M39 (9K38 BuK), S-300W Antey | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Bild 12: passives Lenkverfahren |
passives Lenksysteme gewinnen die zur Lenkung erforderlichen Informationen über die Bewegungsparameter des Zieles aus der Energie, die das Ziel selbst abstrahlt. Derartige Raketen verfügen über Zielsuchlenköpfe die im Infrarotbereich (Wärmeabstrahlung) oder im Lichtbereich (Fotokontrastverfahren) arbeiten. Aufgrund der geringen Energieintensivität werden derartige Systeme vor allem bei Fla-Raketensystemen kleiner Reichweite eingesetzt. Beispiele 9M31 (Strela 1), 9M32 (Strela 2) 9M37 (Strela 10) 9M 333 (Igla) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
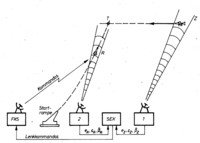 Abb 13: Kommandolenkverfahren |
Kommandolenkverfahren Das Kommandolenkverfahren ist das älteste Verfahren zur Lenkung von Fla-Raketen. Die ursprünglichste Form bestand in der Funklenkung auf Sicht, die besipielsweise bei den Fla-Raketen Schmetterling und Wasserfall gestestet wurden. Bei der Funkommadnolenkung wird in der Fla-Rakete kein Funkmeßzielsuchlenkkopf benötigt, sondern nur ein Empfänger für die Lenkkommandos. Dagegen sind Bodenstationen zur Bestimmung der Bewegungsparameter des Zieles und der Rakete, Rechner zur Erarbeitung der Lenkommandos und Funkkommandosender erforderlich. Beispiele: 3M8 (2K11 Krug), 9M33 (9K33 OSA), 9M331 (9K331 Tor), W750 (S-75 Wolchow), W625 (S125 Newa) Beim Kommandolenkverfahren zweiter Art erfolgt der Empfang der Bewegungsparameter des Ziels in der Fla-Rakete. Diese werden dann an die RLS übertragen | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
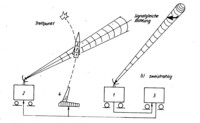 Abb 14: Leitstrahllenkung |
Leitstrahllenkung Die Leitstrahllenkung funktioniert ähnlich dem Kommandolenkverfahren. Allerdings werden hier keine speziellen Funkkommandosender verwendet. Statt dessen wird die Rakete in den Leitstrahl eingeschossen. Die Koordinatenmeßeinrichtung bestimmt die Lage der Rakete bzgl. der signalgleichen Richtung. Daraus werden im Rechner die Lenkkommandos erarbeitet. Derartige Systeme konnen als Einstrahl oder Zweistrahlsysteme ausgeführt werden. Vorteil des Zweistrahlsystems besteht darin, dass dabei Methoden zur Begradigung der Flugbahn verwendet werden können. Leitsrahlsystem wurden bei sowjetischen Fla-Raketen nicht verwendet. Ein Einstrahliges Leitstrahsystem verwendet Cotraves/Oerlikon beim Skyshield-System | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Bei kombinierte Lenksyteme werden idR für FRK mittlerer und großer Reichweite genutzt. Beispielsweise wird beim FRK S-200 die Fla-Rakete mit Funkkommandolenkung an das Ziel herangeführt und in danach im aktiven oder halbaktiven verfahren bis zur Zielvernichtung gelenkt. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Leitmethoden |
Unter der Leitmethode ist das vorgegebene Annäherungsgesetz der Fla-Rakete an das Ziel zu verstehen. Die Leitmethode gibt in Abhängigkeit von den Zielkoordinaten und Bewegungsparametern des Ziels die für das Zusammentreffen von Rakete und Zielerforderliche Raketenbewegung an. Die Art der Leitmethode ist vom Lenksystem abhängig. Bei zielsuchenden Raketen können die Methode der parallelen, die Methode der proportionalen Annäherung oder die Zielverfolgung realisiert werden. Bei den Fernlenksystemen wird die Dreipunkt-Lekmethode in verschiedenen Abwandlungen zur Begradigung der Flugbahn angewendet. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Abb 15: Dreipunkmethode |
Dreipunktmethode: Bei dieser Methode wird die Rakete so
gelenkt, dass sie sich während des Fluges bis zum Zusammentreffen mit dem
Ziel auf der Linie Leitstation-Ziel befindet. Die Dreipunktmethode kommt bei
Systemen mit Kommandolenkung zur Anwendung. Die Rakete ist gerätetechnisch
relativ einfach aufgebaut, da sich Koordinatenmeßeinrichtung und Rechner am
Boden befinden. Diese Methode funktioniert gut, wenn die Krümmung der
kinematischen Flugbahn der Rakete gering ist. Die Lenkgenauigkeit hängt von
der Winkelgeschindigkeit des Ziels ab. Um diesen Nachteil zu kompensieren
und auch bei hohen Winkelgeschwindigkeiten eine möglichst geringe Krümmung
der Flugbahn zu erreichen wurde diese Methoden mit verschiedenen Verfahren
zur Begradigung der Flugbahn erweitert. Dazu zäht die Methode der
halben Begradigung der Flugbahn und Methoden in denen ein Vorhalt aufgrund
der Wahrscheinlichkeitsermittlung/ Szenarienberechnung des Zielwegs
ernmittelt wird. Die Dreipunktmethode wird bei den FRK S-75, S-125, 2K11 Krug und 9K33 OSA verwendet. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Bild 16: Vergleich verschiedener Methoden bei Zielsuchlenkung gestrichelt = Methode der proportionalen Annäherung |
Bei der Zielsuchlenkraketen wird i.d.R. die Methode der
Proportionalen Annäherung angewendet. Dabei handelt es sich eine
Zweipunktmethode, bei der ausschließlich die
Bewegungsparameter des Ziels und der Rakete relevant sind. Darüber hinaus
gibt es auch die Methde der Zielverfolgung und die Methode der parallelen
Annäherung, die jedoch beide nicht bei den Fla-Raketen der TLA zur
Anwendung Kamen. Bei der Methode der Zielverfolgung muß der Vektor der Raketengeschindigkeit ständig auf das Ziel gerichtet sein. Diese Methode führt in Zielnähe zu einer sehr stark gekrümmten Flugbahn, bei der das erforderliche Lastvielfache das verfügbare Lastvielfache übersteigen könnte. Bei der Methode der parallelen Annäherung bleibt während des Fluges bis zum Zusammentreffen mit dem Ziel die Linie Fla-Rakete Ziel parallel. Das führt eigentlich zu einer idealen Flugbahn in Form einer Geraden, alerdings unter den Bedingungen einer konstanten Zielgeschwindigkeit, Zielkurses und Raketengeschwindigkeit. Insofern ist die praktische Umsetzung dieser Methode nicht möglich. Eine einfache praktische Umsetzung der Grundidee ist die Methode der proportionalen Annäherung . Bei dieser Methode sind während des Fluges bis zum Zusammentreffen mit dem Ziel die Veränderung des Vektors der Raketengeschwindigkeit mit der Winkelgeschwindigkeit der Linie Fla-Rakete -Ziel proportional. Damit ändert sich der Winkel des Geschindigkeitsvektots der Rakete auf der Linie Fla-Rakete Ziel nur geringfügig, wenn die Raketengeschwindigkeit größer als die des Ziels ist. Das erforderliche Lastvielfache in Treffpunktnähe ist deutlich geringer als bei der Zielverfolgung. Die Methode der proportionalen Annäherung wurde bei allen selbstlenkenden Fla-Raketen der TLA angewendet. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Aufbau von Fla-Raketen
|
Obwohl Fla-Raketen insbesondere durch Triebwerksart und Anordnung sowie des Mediums (Funkmeß/optisch), der erforderlichen Reichweite und der Anordnung von Flügeln und Stabilisatoren sehr unterschiedlich aufgebaut sein können, weisen sie jedoch grundsätzlich die gleichen Hauptbestandteile auf
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Fla-Raketen mit unterschiedlichen aerodynamischen Flächen:  Abb 20 Die FRa 5W28 des FRK S200 war schwanzlos aufgebaut. Die Ruder befanden sich an den Tragflächen  Abb 21 Bei der 3M9 erfolgt dagegen die Lenkung durch in der Runpfmitte befindliche Drehflügel |
Die aerodynamischen Flächen einer Rakete sind die Flügel, die Ruder und die Stabilisatoren. Die Stabilisatoren, idR am Ende der Rakete angebracht, dienen ihr als Tragflächen, während die Flügel, idR vorn angebracht, aerodynamische Kräfte erzeugen sollen, um die Rakete über die Ruder zu lenken. Flügel und Ruder können auch eine konstruktive Einheit ausgeführt sein, indem die Ruder am Ende der Flügel angebracht sind oder als Schwenkflügel (der ganze Flügel läßt sich über eine Drehachse als Ruder drehen) konstruiert sind.
Abb 22 Schema aerodyn. Flächen 3M8 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Fla- Raketen können jedoch nicht nur über Ruder gelenkt werden. Die Lenkung kann ebenso durch die Ablenkung des Abgastrahls durch Schwenkdüsen oder Strahlruder erfolgen. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Abb 23: FRa 3M8 mit Feststoffboostern  Abb 24: Starttriebwerk der FRa W-750 der LSK/LV  Abb 25 Flüssigkeitsraketentriebwerk (Marschtriebwerk) der FRa W860  Abb 26 Startstufe mit Düse einer FRa 3M9  Bild 27 Übergang Marschtriebwerk (links) zur Startstufe bei einer FRa 3M9 |
Triebwerke
Raketenantriebe können ein- oder mehrstufig aufgebaut sein. Bei mehrstufigen
Raketen soll dass Starttriebwerk vor allem für die Startbeschleunigung zum
Abheben von der Startrampe sorgen und das Marschtriebwerk den gelenkten Flug
sicherstellen. Bei de neueren russischen Fla-Raketen- komplexen, bei denen die
Fla-Raketen senkrecht aus dem Startkontainer gestartet werden (TOR, S-300,
S-400) sind nur einstufig aufgebaut. Die Rakete wird mit Druckluft senkrecht aus
dem Startcontainer ausgestoßen und erst dann startet das Triebwerk.
Bei mehrstufigen Fla- Raketen können die Starttriebwerke als abwerfbare Booster
am Rumpf (3M8 oder W821) oder in Reihe hinter dem Marschtriebwerk
(W-750, W-625) ausgeführt sein. Bei der 3 M9 befinden sich Start und
Marschtriebwerk in Tandemanordnung.Das ausgebrannte Startriebwerk dient
als Brennkammer für das Marschtriebwerk.
Die Triebwerke werden nach Art ihrer Treibstoffe eingeteilt in
Bei den ersten Fla-Raketen wurden Flüssigkeitstriebwerke eingesetz, weil diesesich
zunächst als leistungsfähiger als Fesstofftriebwerke erwiesen und die
Treibstoffzufuhr geregelt werden konnte. Schwachpunkt der Fesstofftriebwerke
jener Zeit war vor allem, dass diese recht unregelmäßig abbrannten. Deshalb
wurde der Nachteil der geringen Lagerungsdauer mit Flüssigem Treibstoff
betankter Raketen und der aufgrund der giftigen Treibstoffe nicht ungefährlichen
Betankung der Raketen in Kauf in Kauf genommen. Die Booster der sowjetschen Fla-FlaRaketen
verfügten aber schon immer über Fesstofftriebwerke.
Ein Problem bildete die Luftzufuhr fürdie Verbrennung der Treibstoffe.
Zur Lösung dieses Problems erhielten die Raketen oft große Luftbehälter
Alternativ wird beim
Staustrahl-Triebwerk (Lorin-Düse,
Lorin-Rohr) die atmosphärische Luft als Oxydationsmittel verwendet, die
in das Triebwerk über Lufteinläufe einströmt. Da die benötigten
Druckverhätnisse im Triebwerk durch die einströmende Luft hergestellt
werden, arbeitet das Staustrahl-Triebwerk erst ab einer bestimmten
Geschwindigkeit. Eine Rakete mit einem derartigen Antrieb benötigt also
immer ein Strarttriebwerk zum Erzeugen der Betriebsgeschwindigkeit für
das Staustrahl-Triebwerk, welches daher nur als Marschtriebwerk
eingesetzt werden kann. Nachteilig wirkt sich aus, dass es bei extremen
Manövern zum Abrß des Luftstroms kommen kann. Aber mit dem Ziel, eine
möglichst große Reichweite zu erreichen, wurden Ende der 50-er Jahre
verschiedene Raketen sowohl mt Feststoff as auch Flüssigkeits-
Staustrahltriebwerken entwickelt, so auch die 3M8 und die 3M9.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Abb 29: Funkmeßzielsuchlenkkopf 1SB4 mit Autopilot und einer FRa 3M9: gut zu erkennen die Empfangsantenne |
Bordlenksystem Das Bordlenksystem der Fla-Rakete lenkt die Rakete so, dass sie dicht genug ans Ziel fliegt, um dieses mittels Explosion des Raketen-Gefechtsteils zu vernichten. Dazu bildet der Autopilot (Flugregler) die entsprechenden Signale für die Rudermaschinen der Rakete, welche die Ruder bedienen, um die Flugbahn der Rakete zu ändern. Entsprechend der Lenkverfahren sind die Bordlenksysteme unterschiedlich komplex aufgebaut. Bei der Funkkommandolenkung befinden sich die Elemente zur Bestimmung der Ziel- und Raketenkoordinaten und der Rechner in der Raketenleitstation am Boden. Aus der Koordinatenermittlungen werden die die Lenkkommandos berechnet werden, welche per Funk an den Funkkommando-empfänger der Rakete übermittelt werden, der diese an den Autopiloten übergibt. Daher beschränkt sich indiesem Fall ds Bordlenksystem auf den Empfänger für die Funkkommandos und den Autopiloten. Bei den Zielsuchlenksysteme ist das Bordlenksystem erheblich komplexer aufgebaut als bei der Kommandolenkung.Diese Systeme nutzen einen extra erzeugten oder bereits vorhanden Energiekontrast des Zieles gegenüber seiner Umgebung aus, um dessen relative Lage zu ermitteln und bilden daraus die Lenkkommandos für den Autopiloten. Konstruktiv sind diese Funktionen im sog. Selbstlenkkopf (Zielsucher) vereinigt, der sich an der Spitze (dem Kopf) der Rakete befindet. Beim aktiven Verfahren verfügt der Selbstlenkkopf der Rakete über einen Sender und einen Empfänger, beim halbaktiven und passiven Verfahren nur einen Empfänger.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Abb 32: GT einer 3M8  Bild 33:Antennen des Fubkzünders einer FRa W-750 (die der 3M8 und der 3M9 sahen im wesentlichen genauso aus)  Bild 34 Gefechtsteil der FRa 3m9 2012 Pinnow |
Gefechtsteil
Der Gefechtsteil der Fla-Rakete wird in ausreichender Nähe des zu bekämpfenden
Zieles zur Explosion gebracht, um das Ziel zu vernichten. Um das Flugziel hinreichend stark
zu beschädigen wird, hat der
Gefechtsteil einer Fla-Rakete eine hohe Splitterwirkung und ist meist so
konstruiert, dass die Splitterwirkung in Richtung des Zieles besonders hoch ist.
Zus sicherstellung, dass Der das der Gefechtsteil in angemessener
Entfernung zum Ziel gezündet wird, verfügen Fla-Raeten über Annähernszünder, die
idR als Funkzünder ausgeführt sind. Durch den Funkzünder wird selbstständig die Entfernung zum Ziel ermittelt und den
Zündzeitpunkt bestimmt. Dazu werden die selben Verfahren verwendet, wie bei der
Selbstlenkung, also aktive, halbaktive und passive Verfahren
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Abb. 35, 36: Schemen Aufbau und Wirkung Gefechtsteil | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Fla-Raketen im Container  Abb. 37 Container zur Lagerung der FRa 3M8  Abb 38 Container K5PA für 3M9 - 2006 Trier  Abb 39 Container für 9M33 im Transportgestell 2006 -Trier |
Die Container der ersten Fla-Raketen waren praktisch nur "Verpackung" der
Raketen, um eine Beschädigung der Raketen beim Transport in die Lager zu
verhindern. Um diese Raketen verwenden zu können, mussten sie endmontiert,
die Bordelektronik geprüft und eingestellt werden, sowie mit
Treibstoffen (bei Flüssigkeitsraketen) und Druckluft betankt werden. Diese
Container dienten auch zur Aufbewahrung der Fla-Raketen in der
Langzeitlagerung in den Fla-Raketentechnischen Basen und den Truppenteilen.
Die Montage und Vorbereitung erfolgte in den technischen Batterien 2K11 und
2K12 in sogenannten technologischen Durchläufen. Mit dem FRK kleiner
Reichweite begann in der UdSSR die Verwendung
von Fla-Raketen in Containern, in denen die Raketen nicht nur transportiert
und gelagert werden konnten, sondern aus denen die Raketen auch gestartet
wurden. Später wurden begonnen, auch bei den FRK größerer Reichweiten
Startcontainer zu verwenden. Am deutlichsten ist dieser Wechsel beim FRK
9K33 zu sehen. Durch die Verwendung von Startcontainern entfielen die
umfangreichen Montagearbeiten, die Zeit zum Beladen der Startfahrzeuge wurde
verkürzt und die Raketen waren auch auf den Startfahrzeugen gegen
mechanische Einwirkungen geschützt.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Bewaffnung der NVA | Die TLA der NVA war mit folgende Fla-Raketen (bzw. deren Modifizierungen) ausgerüstet: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Bildnachweis:
Abb. 1, 19, 35, 36, 41 MTH Truppenluftabwehr
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||











{kind=link}
überarbeitet Ralf Wagner 2016